破壊的イノベーションを起こすことを目的にし、分野や国境の枠を超えて独創的な人材を生み出すことを目的とした慶應大学大学院メディアデザイン研究科(KMD)。そこで学ぶ鍋島純一さんの研究プロジェクト『Arque』が大きな話題を集めている。人間のために作られた尻尾は、僕らの生活をどう変えてくれるのだろうか? この作品がどのように生まれたのかを含め、鍋島さんに話を訊いた。

身体拡張のパーツとして発想した尻尾
「尻尾というコンセプトが生まれたのは、入学してすぐの5~6月(2018年)と早いんです。身体拡張の方向で何か考えようとしたとき、腕や足の分野ではなく何か新しいものはないかと模索しました。そんなとき、バイオミミクリーの発想で考えたのが尻尾でした。人間が猿だった時代に有していた器官ですし、自分が動物好きだったことも大きいですね」
バイオミミクリーとは、自然界の生物が持っている構造や機能を模倣し、新たな技術を開発することを指す。1958年にアメリカ空軍の医師である、ジャック.E.スティールが提唱し、コウモリを模倣したレーダーや、クモの糸を模倣した繊維など、世界中さまざまな分野で新しい技術が生まれている。
「研究の初期段階では、尻尾とは何かという根源的なところを調べていきました。結果的に、犬であれば感情表現、水中の生物なら移動、猫などはバランス感覚など、大きく分けて3種類の機能があることがわかりました」
3種類といっても単機能ではなく、どの生物も複合的に使っている尻尾。そのなかで、どんな動物にフォーカスしたのだろうか。
「人間の祖先とも言われるオマキザルという猿に着目しました。普段は木の上で生活していて、地上では木の実を石で割って食べています。そして、大きな石を運ぶときは二足歩行になり、バランスを尻尾でとりながら移動するんです。その生態をヒントに、尻尾を装着することでバランス感覚が向上するものを作ろうと思ったんです。社会実装を考えると、三半規管の弱い高齢者のサポートや、荷物を運ぶ物流業界、重労働の介護業界に向けたものが考えられますが、現時点ではまだまだです」

現在はデモンストレーション重視の仕様に
プロトタイプは、簡易的な円盤をワイヤーでつなげ、カタチから作るところからスタートした。その後、お尻の筋肉で動かせないかと、お尻と腰に筋電位センサーを取り付けてみるなど、試行錯誤を繰り返したという。同時に、動物ごと尻尾の骨格の違いを調べていった。
「猫や猿のような、細くてフワフワした尻尾は軽くていいのですが、人間が使うには頑丈さが足りない。そこで、衝撃に強いタツノオトシゴを真似てみたんです」
感情表現を主とする尻尾なら、ふわふわのほうがキュートだが、生活の場で使うのならば耐久性や耐衝撃性は欠かせない。『Arque』はどちらかというとゴジラの尻尾のような見た目だ。
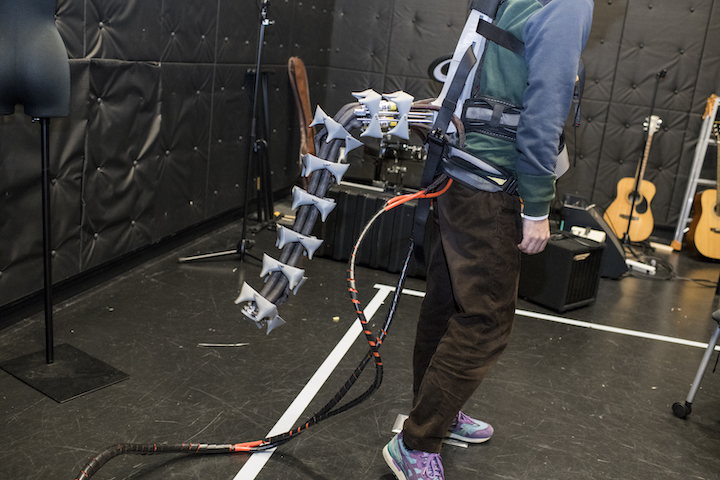
「現在、特殊なゴムチューブを使い空気圧で調整する人工筋肉を4本使っています。でも、これだと大きなコンプレッサーが必要なので、携帯ができず実用的ではない。また、かつてはジャイロセンサーを取り付けて重心の位置を測定し、背中を曲げると尻尾が動いたりもしました。しかし、いまはデモンストレーションを重視していて、尻尾の感覚をより快適に味わえるようジョイステイックで動かす仕様にしています」
出発点はデジタルアート
約2kgの尻尾を実際に装着してみると、フィット感が高いためか重さはそんなに感じられない。片足で立ってもふらつかない、重心を感じられるという機能面もあるが、何より尻尾をつけたビジュアルが面白いのが特徴だ。
「そうなんです。最初の考え方がアート文脈なので、当初からバランスを徹底的に研究したものではなく、あくまでもコンセプチャルな作品。シーグラフなど海外の学会でもそこを評価してもらった感じです。アメリカ人には “クレイジー”と言われました(笑)」
2020年1月には、『アジアデジタルアート大賞展FUKUOKA』のインタラクティブアート部門『優秀賞』も受賞。そのほか、SNS上ではコスプレ界隈からの反応が良いという。
新しいスポーツへの
展開も構想中!?
慶應大学大学院メディアデザイン研究科、通称KMDは大学院ということもあり、さまざまなバックボーンを持った世界各国の人たちが集まっている。重視しているのは、独創的な発想から生まれる破壊的なイノベーションである。
「ここに来る前は、大阪大学経済学部経済経営学科で経営や統計を学んでいました。しかも、当時は部活動ありきでアスリート寄りの生活だったんです。その後、『ゆるスポーツ』という、『超人スポーツ』と似た年齢や障がいも関係ない、新しいスポーツのルール作りに夢中になって。そこから、身体性メディアに興味が生まれ、KMDに入学したんです」
鍋島さんは今年で卒業し、4月からはものづくりを続けながら社会人生活を送る予定となっている。
「『Arque』の最終目標は社会実装ですが、そこに近づける過程でまったく別のものに使われることもあると思っています。また、『ゆるスポーツ』のような新しいスポーツにも使えないかなと考えています」