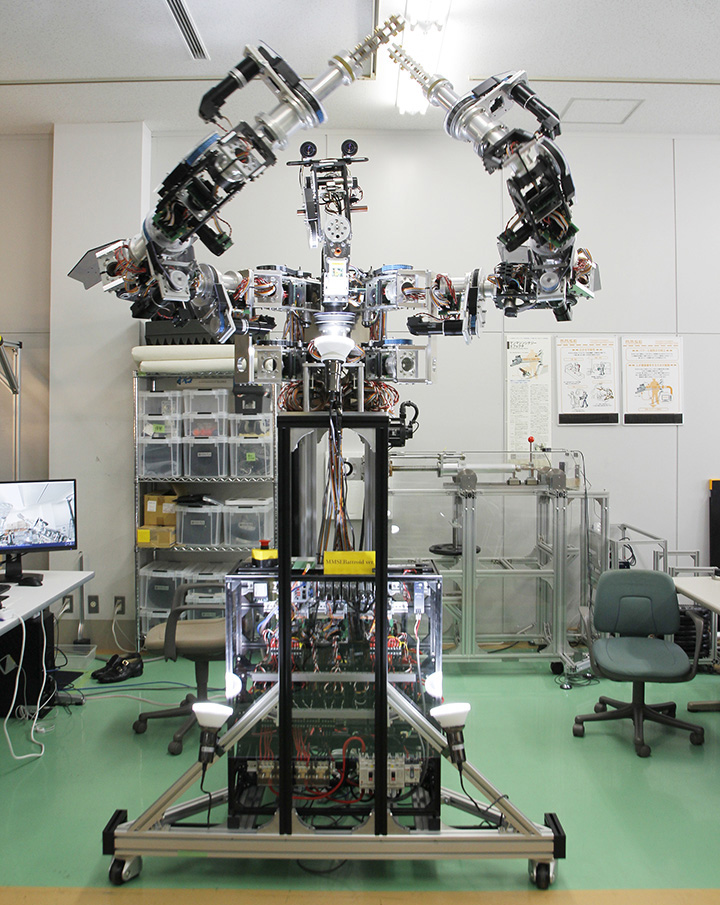
“マンマシンシナジーエフェクタ(人間機械相乗効果器)”という独自の概念をベースに、ロボット開発を行う“株式会社人機一体” 代表取締役 社長・金岡博士。未来を劇的に変える可能性を秘めたロボット開発に至ったその起因、そして秘めた思いに、HERO X編集長・杉原行里(あんり)が迫る。
コンプレックスを強みに変え、
研究に活かすということ
杉原:金岡博士の根幹にある、屈強なフィジカルへの渇望や、ロボットで世界と人を変えていきたいという思いは、どこから来ているのですか?
金岡博士:恐らく子供の頃から「弱さに対する恐怖」があったのかもしれません。自分が弱い状態で社会を生きていかなくてはいけない、ということに対する恐怖や絶望感みたいなものが幼少期から強かったように思います。弱いままの自分でいるのは嫌だ。強くなるにはどうすればいいのか。みたいなことを幼い頃から考えていました。
そのために勉強するとか、武道やスポーツをやるというのは当たり前に思いついて行動に移しましたが、必ずしも一流にはなれませんでしたし、そもそもたとえ一流になったとしても、人間であることの弱さからは逃げられない、と気付いてしまいました。それでも、何としてでも、少しでも克服したいというのが、一番根っこにあるモチベーションかもしれません。

杉原:かなり長い間、そのモチベーションで来ているということですよね。
金岡博士:幼稚園とかそのくらいからでしょうか。
杉原:でも、今の話を聞いた子供や若い子たちは、すごくテンションが上がると思います。金岡博士のことをヒーローだと感じるんじゃないですか。みんな何かしら抱えているものは有るにしろ、普通はそこの部分を隠すというか、言わないようにするじゃないですか。僕は常に満足が出来ない部分があるんです。あれもやっとけばよかった、もっと出来たはずだとか。人がどれだけ褒めてくれても、天邪鬼なのかもっともっとってなってしまうんです。逆に言ったら、それがモチベーションになっているのかな。

金岡博士:そうですよね。私も弱いままでは満足できません。人間のレンジをはるかに超えて強くなりたいという超人願望があるんですよ。理系の研究者出身のくせに、その昔は、意外とオカルトが好きだったりもしたんです。スプーン曲げもしました(笑)。改めて考えてみると、その根底にもきっと超人願望みたいなものがあって。
とはいえ、私は普通の人間で、全く超人ではなかった。我々の研究開発は、その絶望から始まっています。その絶望を克服する超人願望をいかに叶えるかが目的になってくる。そしてそこでは、よくある「綺麗な」欲望ではなくて、もっとドロドロとした欲望をちゃんと解放させられるような手段を求めているのだと思います。ロボットに対する思いやモチベーションを再確認するために自己と向き合い、弱さに対する恐怖を強みに変える。その作業こそが、新たな進化への確実な一歩となっているようだ。
人機一体に求められていること
杉原:過去に農業革命、産業革命、そして現在のIT革命があるように、革命が起こるタイミングでその時の欲望や、それによって生じる障がいが変わってくると思うんです。そう考えると、今後ロボット革命というのが起きた時に、また何かしらの問題が発生すると同時に、新たな可能性も確実に生まれますよね。その時、現在人機一体に投資している企業というのは、何に期待をしているとお考えですか?
金岡博士:我々がやっていることは、ある意味浮世離れしていますので、前提として、短期ではなく5年から10年くらいまでの中長期的なスパンで見てくれていると思います。我々のビジネスプランは穴だらけでツッコミどころ満載、とても短期的に利益が出るようなものではありません。普通の投資家には相手にされないでしょう。それでも投資してくださる方々がいる。もちろんベンチャー企業である以上は当然ビジネスとして成功することに期待されているとは思いますが、まずは“夢”をちゃんと形にして見せてみろという部分が大きいと感じています。その夢を、言葉や絵だけではなく、見た目だけのハリボテでもなく、本物のロボットとして我々が皆さんに、新たな可能性を提示出来るかが問われているのではないでしょうか。
杉原:なるほど。そういう意味では、皆さん投資家であるとともに先生の考え方のファンなのかもしれませんね!
金岡博士:もしそうなら、とても嬉しいです。
杉原:ロボットって皆さん興味があるのに意外と調べないから、一般の方々に具体的に理解してもらうのは、まだまだ難しい分野ではありますよね。検索をかけても、ガンダムとかがどうしても先に出てきてしまいすし。フィクションとして人気のコンテンツが大量にあるので、どうしても金岡博士のロボットのような「リアルな」情報には届き難いですよね。逆に言えば、それだけフィクションのロボットが溢れているならば、みんながロボットに対し夢を持っていると言い方もできるのかなと。
そこで少し話を変えたいのですが、エクソスケルトン(外骨格)など福祉分野との融合が世界的にも盛んになってきていますが、具体的に人機一体ではこの分野に取り組まれていたりしますか? またどのような進化を遂げていくとお考えか聞かせてもらえると嬉しいです。

金岡博士:どう作るかによるとは思うのですが、現状のエクソスケルトンはあくまでも補綴ですよね。結局人間が持つ能力を大きく上回るということは最初から期待されていない。もちろんこれから技術の進歩はあると思いますが、エクソスケルトンである限り、最終的に目指すところはどうしても「歩けない人を歩けるようにしよう」的なところに落ち着くはずです。それはもちろん素晴らしいことですが、一方で、出力のレンジが決まっていることは明らかです。我々が目指す、「弱さ」の克服としての身体能力の拡張は難しい。
もうひとつは、補綴という目的でデバイスを使う以上は、どうしてもその補綴デバイスを隠す方向に行ってしまいます。本質的に「隠さなくてはいけない物」と「身体能力の拡張」は相容れないのではないでしょうか。自己矛盾を抱えているように思えます。具現化しても、拡張デバイスではなく、軽く、小さく目立たない服の一部みたいになってしまうと、技術側の人間としては辛いんですよね。我々のロボットは小さくして隠すつもりは全くなく、むしろもっと大きくなって目立っていきます。
杉原:歩くことを100とする考え方にするから、小さくするとか、隠しやすいという方向にいくんでしょうね。ただ、歩くという100を大きく超えて、例えば「飛べる」ということになったら、倫理的なことは別にして自分の体をどうにかしてもいいかなと、僕は思っていますよ。そういう意味では、人機一体と医療や福祉の分野がマッチングする時が来るんじゃないかと期待しているんです。
金岡博士:そこはやりたいですね。分かりやすく自動車で説明すると、人機一体としては自動車という「型」、すなわちプラットフォームを作ることが重要であって、障がいがある方だけのための移動手段を先に作るというのは、少し順番が違うと思っています。自動車という型があるから福祉車両が一般化するのであって、その逆ではない。まずはみんなが使えるインタフェースがあって、みんなが使いたいと思うこと。そして、それを使う能力がある上で、最終的にみんながちゃんと使えるようにプラットフォーム化するという順番だと考えています。
ですから、我々も人が思い通りに動かせるロボットを作って、その上で、身体能力が一部欠けている人たちにとっても思い通りに操縦できるようにすることが大切なんです。たとえ回り道に思えても、そういうインクルーシブな意味での研究開発を続けられるよう、最大限の努力をしていきたいですね。
人とロボットの相乗効果により創られる、人類の新しい未来のために、先端の研究・開発をしている金岡博士。だからこそ、誰よりも人間らしい一面を持ち合わせているのだなと感じた。けっしてロボットや人工知能には持ち得ない感情を大切にしながら、人機一体はさらなる進化を我々にもたらしてくれるのだろう。また、社員は随時募集中とのことなので、興味がある方は是非大きな一歩を踏み出して欲しい。

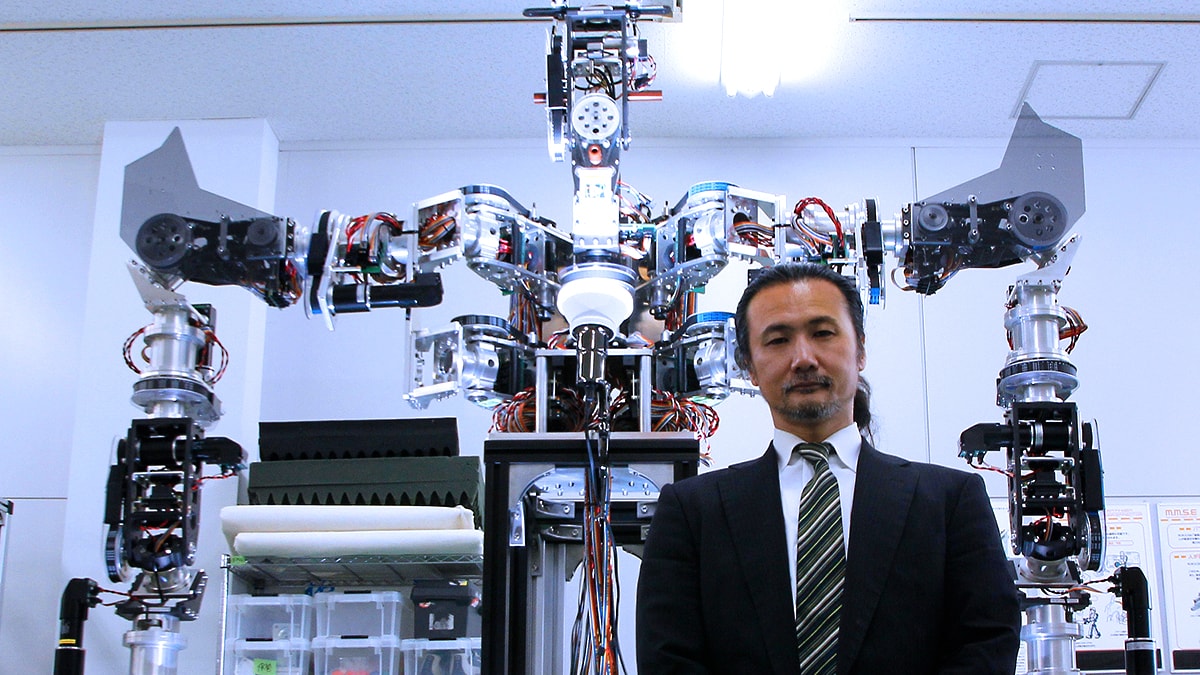
金岡博士
(株式会社人機一体 代表取締役社長 兼 立命館大学 総合科学技術研究機構 ロボティクス研究センター 客員研究員)
ロボット制御工学者、発明家、起業家、武道家。専門は、パワー増幅ロボット、マスタスレーブシステム、歩行ロボット、飛行ロボット等。ロボット研究開発の傍ら、辛口のロボット技術論を吼えることがある。マンマシンシナジーエフェクタ(人間機械相乗効果器)という概念を独自に提唱し、あまり相手にされないながら、十年来一貫してその実装技術を研究・蓄積してきた。そして今、業を煮やして、ビジネスとしての社会実装に挑戦するため「株式会社人機一体」を立ち上げた。
http://www.jinki.jp/









 公平や平均が良しとされる世の中に一石を投じる
公平や平均が良しとされる世の中に一石を投じる