コミュニケーション型のロボットを数多く開発しているユカイ工学。テーマとしているのは「コミュニティの再構築」だという。スマートシティ化が進む現在、ロボットの役割は今後どうなっていくのだろうか。IoTによって家電がロボット化していく? 人間は、どんなふうにロボットとコミュニケーションしていくようになる? ユカイ工学CEOの青木俊介氏に編集長・杉原行里が聞く。
めざしているのは
コミュニティの再構築
杉原:最初に青木さんとお話をさせていただいたのは、今年のCEATECというイベントで、テーマが「スマートタウン」でしたよね。広義でも狭義でもどちらでもいいのですが、青木さんが考えるスマートタウンってなんですか。
青木:僕は、例えば交通的なインフラとか、割と大規模なインフラが必要なものはスマートシティと呼ばれるジャンルのものだと思っています。それに対して、スマートタウンは、人の足で歩いて回れる単位で考えられるものではないかと。特にIT技術が進んでくると、カメラとAIを組み合わせたりすることで、今まで分断されがちだったコミュニティが技術によって取り戻せるのではないかということを考えています。

杉原:スマートシティとスマートタウンの認識がそもそも違うという考え方が、かなり面白いですね。やはり青木さんにとって、コミュニティは大きなテーマですか?
青木:僕はそう思っていますね。コミュニティの再構築。
杉原:その再構築のもととなるイメージは、例えば時代でいえばいつ頃でしょうか?
青木:『ちびまる子ちゃん』とかでしょうか。
杉原:確かに僕らの時代は、『ちびまる子ちゃん』や『サザエさん』の世界でしたよね。家に帰って親がいないと隣の家に行きましたもんね。
青木:そうそう。友達の家に行ったら夕ご飯が出てきて、勝手に食べて帰ってくるみたいな感じでしたよね。

杉原:今はその余白みたいなのは少しずつなくなってきているということですか?
青木:そうだと思います。住居がオートロックだったりすると、小学生が友達の家に気軽に遊びに行くこともできないですよね。昔だったら「あーそーぼー!」って呼びに行っていましたが。今は遊びに行く前に携帯に連絡していかなきゃいけないとか。
杉原:「あーそーぼー!」って言っても、マンションとかだと家に入るまでに何個もボタン押さなきゃいけないですもんね。昔は携帯もないから、公園に行って誰かを待っていましたけど。
青木:行ったら誰かいるだろう、みたいな。あの感覚が面白いですよね。
杉原:一方では高度経済成長期を経て、テクノロジーによって多くのことがコンビニエンスになったり、マンションだったらセキュリティが向上したりといったメリットもある。全体的に裕福になったと思いがちだけど、今度はテクノロジーによって失ってしまった、もしくは失いそうなものを、ユカイ工学はテクノロジーによって取り戻そうとしているということでしょうか。僕がいつも感じるのは、青木さんは今の時代が悪いと言っているのではなくて、今の時代にあったアップデートの方法で、昔あったいいものを付帯させていく、融合させていくことを考えているのではないかと思います。
青木:おっしゃる通りです。
家電と会話できる
=ロボット化ではない!?
杉原:世界の潮流としては、どういうロボットが今後生活の中に入ってくると思いますか。
青木:僕たちが必要だと思っているロボットは、インターフェースの役割が大きいと思っています。例えば、皿を洗うとか洗濯をするといったことは、ロボットよりも家電のほうが効率もいいし安い。だから、皿洗いをロボットがやる日はこないと思っています。すでに家電の洗濯機は洗濯物の汚れ具合を検知して必要な洗剤量を変えるとか、かなり賢いことをやっているので、技術的に見ればもう家電はロボットです。でも、洗濯機に名前をつけて可愛がっている人はあまりいない。ロボットって名前をつけたくなるものですよね。
杉原:うちの娘が今5歳なのですが、ロボット掃除機のルーロを「ルーロちゃん」と呼んでいます。

青木:なるほど。ルンバとかもそうですけど、動き回るものって何か特別な感情を抱きがちですよね。
杉原:その中で白物家電みたいなものがIoT化されていく。
青木:そうなると思いますが、僕はその時に必要なのが冷蔵庫と直接会話できる機能かというと、たぶんそうじゃないと思います。顔がない家電に向かって人間がコミュニケーションをとることはなくて、なにかしらインターフェースが絶対に必要になる。それがこういうロボットだと思ったんですね。
杉原:要は翻訳家というか、通訳をする存在ですよね。
青木:そう、通訳をする人。例えば、室内の家電をコントロールする時も、何か顔のあるインターフェースが人間は欲しくなるはずだと思います。それがロボットの役割になると考えてまして、アレクサとかも機能としてはかなり近いと思います。
杉原:今後、インターフェース側はどんな進化をするでしょうか。
青木:さっきおっしゃったように、ロボット掃除機ってなんとなく愛情をもったりとか、ケーブルにひっかかったら助けたかったりしますよね。僕はそれがロボットのもっている一番の強みだと思っています。人に感情を起こさせるというか、人を説得したり、人のモチベーションを起こしたり、行動を促したりできるというのがロボット型のインターフェースの強みですよね。
杉原:とすると、これから出てくるかもしれないものは、ヒューマノイド的に人間により近づいた形状のものや、しゃべりかたが人間に近いロボットでしょうか?
青木:出てくるとは思うのですが、家で使うぶんにはまず、ヒューマノイド型は大き過ぎますよね。あとは日本語で会話をするとなると、ロボットが全部聞いているという前提で生活をすることになるので、さらにスマホとつながっていると自分の行動も全部そのロボットが把握していたりして、すごく嫌な感じになるじゃないですか。そういうのはダメなんですよ(笑)。
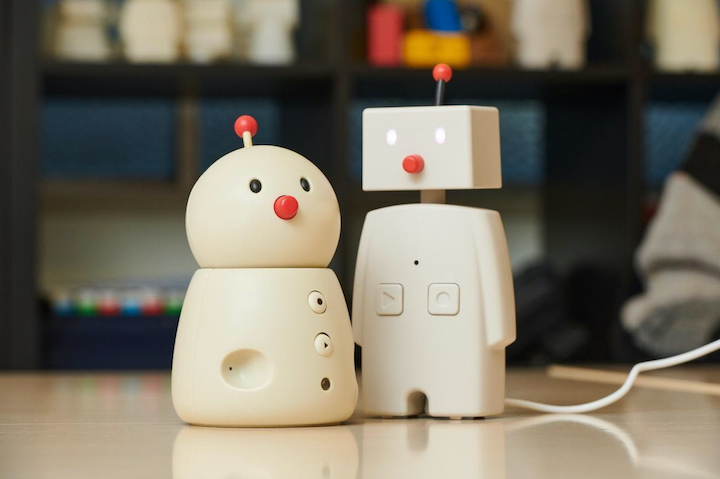
杉原:では、ロボット型インターフェースは『BOCCO』みたいなプロダクトがアップデートしていく?
青木:はい。例えば『BOCCO』は、お年寄りに「薬を飲んでね」という風に言ってくれたりします。今もユーザーさんがそのように利用しているケースが結構あります。すごく面白いのは、家族に「おばあちゃん、薬、飲んでるの?」とか言われると「うるさいわね」みたいに角が立つけれど、ロボットが言うと進んで飲んでくれるらしいんです。あとは夫婦で使われている方で、朝「火曜日はごみの日だよ」みたいなことを言ってくれるから、旦那さんがゴミ捨てをちゃんとしてくれるようになって夫婦喧嘩が減った、とか。
杉原:人間に言われるとイヤだけれど、ロボットにいわれると素直に聞きたくなるというのは研究テーマになりそうですね。仮に『BOCCO』をハードウェアととらえて、この中にどんどんアプリケーションを入れていくのであれば、僕は音声認識ソフトが入ると面白いと思います。例えば、高齢者の言葉のスピードや強弱で認知症の兆候というものが検知できるから、それを認識して家族に伝えるサービスがあれば面白いかなとか。あとは子どもだったら、共働きで親がいない時の様子を検知して、「実はこの子は明るくしているけれど寂しそうだよ」と言ってくれるソフトが出てくるとか。インターフェースコミュニケーションロボットを通じたビジネスやサービスが今後増えてきそうですよね。

青木:増やしたいと思っています。例えば語学学習やダイエットは、自分ひとりの力で続けようとすると、すごく大変じゃないですか。ロボットは人の行動を促すことが得意なので、語学の学習だったら定期的に英語で話しかけてきたり、ダイエットだったら「今週は、あと何キロは走ったほうがいいよ」とか言ってくれたりする役目ができると思います。
杉原:語学はすごくわかりますね。一人でやっていることを、ロボットが拡張してくれると嬉しいですね。
青木:サポートしてくれるものがほしいということだと思います。あとは、例えばお金を貯めるとかいうのもそうですよね。カードと連携して「使いすぎだよ」とか言ってくれると助かりますよね。
杉原:今月の請求額は……特にムダだったのは……って。それはイヤかもしれない(笑)。
裏テーマは「妖怪」。
そこにいるだけで幸せになれる
杉原:次に青木さんが考えているロボットはありますか? 期待しているはずですよ、みなさん。
青木:そうですね。BOCCOもそうですけど、わりとテーマが「妖怪」だったりします。家に一台置いておくと、家族が笑顔になる、幸せになる。座敷童というのが一応、BOCCOの裏テーマです。『となりのトトロ』でも天井裏に何かいるとか、妖怪っていろいろなのが潜んでいるじゃないですか。そういう世界観が近いと思います。
杉原:この前お聞きした二足歩行で玄関に迎えに来るロボットもいいですね。迎えに来る以外何もない。しゃべるとトゥーマッチですよね。
青木:家であんまりしゃべりたいとは思わないですよね。猫とか犬はしゃべらないからいいわけじゃないですか。
杉原:これからユカイ工学として、コンソーシアムも含め、様々な企業との掛け算というのは始まるんでしょうか。
青木:そうですね。ぜひやりたいと思っています。
杉原:ぜひ青木さんとRDSチームで何かやりましょう。今日はありがとうございました。
ユカイ工学株式会社 代表 青木俊介 (あおき・しゅんすけ)
東京大学在学中にチームラボを設立、CTOに就任。その後、ピクシブのCTOを務めたのち、ロボティクスベンチャー「ユカイ工学」を設立。「ロボティクスで世界をユカイに」というビジョンのもと家庭向けロボット製品を数多く手がける。2014年、家族をつなぐコミュニケーションロボット「BOCCO」を発表。2017年、しっぽのついたクッション型セラピーロボット「Qoobo」を発表。2015年よりグッドデザイン賞審査委員。