男子たるもの、一度くらいは“巨大ロボット”に憧れた経験があるはず。自らが操縦席に乗り込み、生身の力では到底どうすることも出来ない問題を、桁外れの力ですんなりと解決していく。そんな幼少期に描いた憧れを今まさに実現させようとする人物こそ、“株式会社人機一体” 代表取締役社長・金岡博士である。そして今回は、HERO X編集長・杉原行里(あんり)が、マンマシンシナジーエフェクタ(人間機械相乗効果器)という独自の概念を始め、金岡博士が見据える未来を紐解くべく、その真意に切り込んだ。
ロボットの在るべき姿に革命を起こす

杉原:過去の金岡博士へのインタビューを読ませていただいていて、「ロボットの世界にパラダイムシフトを起こしたい」というすごく気になる一文があったのですが、具体的にはどのようなことでしょうか?
金岡博士:我々の技術的なベースはもちろんロボット工学にあります。そして、我々の技術のコアは、必ずしも単体のロボットを上手く作る技術ではありません。先ほど実際にご体験いただいたように、いかに人とロボットを繋ぐかというインタフェースの技術にコアがあります。我々は大学発ベンチャーですが、大学の研究という「軛」、すなわち厳密な新規性から解き放たれたことで、大部分は教科書レベルの枯れた技術を使い、それをベースにしつつも、人とロボットを繋ぐコア技術に注力して発展させていくことができるようになりました。
パラダイムシフトという点では、今まではロボットをいかに賢くしよう、器用にしようというロボット単体での視点だった部分を、人とロボットをひとつのシステムとして捉えた時に、何が出来るかを考え、技術というよりは人々の意識を変えていくという話だと思います。


指先から伝える直感的な操作力の指示で、パワーを増幅してスチール缶を潰している感覚を体験出来るロボット、“パワーエフェクタ ver.2.1”
杉原:その先に見える世界というのはすでに考えられているのですか?
金岡博士:人とロボットを繋ぐこと、人の外部身体として操ることの出来るロボットを作ることで、人という存在そのものを進化させたいと思っています。脳はもっと色々な機能を持っていて可能性があると思われるのに、その力を発揮するためのデバイスがない。人はこの肉体に閉じ込められていて、身体はいつも制約であり、自分がやろうとしていることを必ずしも全部できるわけではないですよね。
一方、知的な面については、IT機器が発展してきたこともあり、昔は大変な苦労をしていたようなことでも、今ではかなり色々なことが出来るようになりました。それと同じようなことを、フィジカルな面でも実現したいと考えています。我々の肉体は、人の脳の処理能力に合わせて出来ているというよりは、むしろ外部的な制約によって決められているので、人も動物として生きている以上、脳の潜在能力を使い切ることは不可能です。
ならば、脳の潜在的な能力に合わせ、体の方を作り変えたい。ただし、サイボーグといわれる工学的な意味での肉体改造や、ドーピングの類の医学的な意味での肉体の増強については、技術的な困難さに加え、グロテスクに見えるので、あまりそちらの方向には行きたくありません。
じゃあどうするんだと考えた時、サイボーグのように人に機械を組み込むのではなく、機械の体を準備し、密接なインターフェースを通して、人の感覚を全部機械側に移してしまえばいい。その一部を今日は体験していただきました。

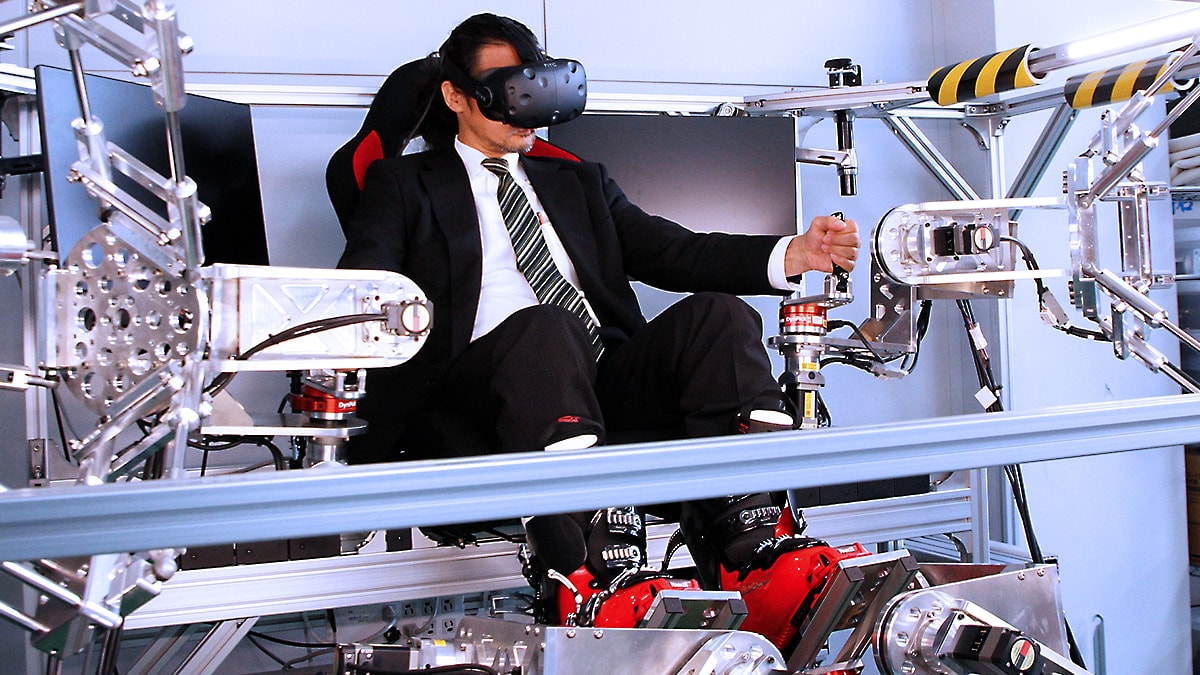
スレーブ装置“MMSEBattroid ver.1.0”を操縦する編集長
金岡博士:人が主観的にロボットに憑依する、ロボットに「なる」ためには、人が物理的かつ直感的に操ることのできる外部身体としてのデバイスをしっかりと作り込むことが必要です。一旦繋いでしまえば、それは人の身体の一部ですからね。その機能を高めていけば、今まで活用していなかった人の潜在能力が使えるようになるんじゃないか。人の可能性を拓くためのツールとしてのロボットデバイスを作ることが、我々の本当の目的です。
杉原:人が持っている身体能力を、ロボティクスをツールとして拡張していくという認識であっていますか?
金岡博士:おっしゃる通りです。
杉原:金岡博士の過去の記事の中でも、技術の進化について自動車を例に説明されていたと思うのですが、ロボットにおいてこのような技術の進化はどこまで広がるとお考えですか?
金岡博士:むしろその限界を見てみたいというのが、ひとつの夢です。最初は、我々が「人型重機」と表現する人型の巨大ロボットを作って、そこに憑依するという形をとると思います。人型にしている理由は、人型の方が主観的に憑依しやすいということと、その方がメディア受けがいいと思いまして(笑)。
杉原:間違い無いですね(笑)。
金岡博士:ただし、忘れてはならないのは、「人型重機」の開発は我々にとって一つのシンボルであるということ。つまり、我々の技術力と近未来の可能性を示す意味で非常に重要ですが、それは最初の入口に過ぎないということです。人の身体は、そもそも人型でなければならないのか、というところまで含めて可能性を探るというか。
ある意味、それさえも制約なのかもしれないし、手足がもっと多くてもいいかもしれない。場合によっては人型と全く異なる形の方が、もしかするといいのかもしれない。最終的に、人型からの「解脱」が進むことさえあるかもしれません。そこまで見てみたい。

杉原:ロボット倫理学は、日本という国や国民性を見た時に、意外と受け入れ難いものなのではないかと感じているのですが、そのあたりはどのようにお考えですか?
金岡博士:確かに、人型からの「解脱」まで視野に入れた未来の可能性を探る上では、ロボット倫理学が必要かもしれません。ただ、遠い将来のことは分かりませんが、ここ10年程度のスパンでの我々の技術革新を考えれば、ロボット倫理学においてクリティカルな課題は生じないのではないかと思っています。もちろん法的な問題は沢山あって、それをひとつずつクリアしていかなくてはというのはあるのですが、新しい概念を導入しなければ解けない課題はほとんどありません。
これは、我々がロボット側の自律性を最小限に抑えるという方針の元に研究していて、最終的な責任はすべて操作する人の側にあるというのが前提だからです。そういう意味で、自動車と同じということです。
杉原:車、飛行機、船、ロボットみたいな感じで、人が乗って操作するツールがひとつ増えるだけということですね。だとしたら、今議論されている「AIが人類を乗っ取る」みたいな話は、完全に違うカテゴリーの話ということか。
金岡博士:そういうことになります。実体がないものについて議論するのは、正直不毛だと思っているので、AIによってコントロールされたロボットを主要な構成員とする社会でのロボット倫理学のようなところにはあまり興味がありません。それよりも、今目の前にどんな問題を抱えていて、それを解決するために使える技術があることを明らかに分かっているならば、それを作り、選択肢として提示する方が先だと考えています。
杉原:文化を作っていくようなイメージですかね?
金岡博士:いろんなところで言っているのですが、まずは基本的なコンセンサスをとらなくてはいけないと思っています。それは、確かに「文化」と表現できるのかもしれませんね。
「ロボット」と言ったとき、ある人は自律ロボットをイメージするでしょうし、ある人はガンダムをイメージする。人によって受ける印象が大きく変わるバズワードです。同様に「ロボットを作るんだ」と言ってしまうと話が噛み合わず、議論が収束しなくなってしまいます。
金岡博士が提唱する新しい概念

杉原:逆に新しい言葉を作られるつもりは?
金岡博士:そうですね、「人が操作するロボティックな機械の総称」は必要だと思います。人機一体社で使っている“マンマシンシナジーエフェクタ(人間機械相乗効果器)”という言葉はそのひとつです。人が機械を直感的に、思い通りに操作するだけではなく、人の意志がロボットボディのダイナミクスに導かれ、ロボットの動きとして発現する。その相乗効果をデザインしていく、というコンセンサスが、「マンマシンシナジーエフェクタ」という言葉に込められています。
杉原:ロボットが大事というよりかは、マスタスレーブとの繋がりというところに大きな意図を感じるので、アウトプットとしてはありとあらゆる可能性を持っていると感じます。
そういうった中で、ボストン・ダイナミクス社が、4足歩行のロボットをいよいよ来年発売するのと、水道橋重工とMegaBotsのリアル・スティール (参考:https://robotstart.info/2017/10/18/kuratas-megabots-battle.html)のような大会がありましたよね。僕はあのようなジャンルをエンターテインメントと思っているのですが、人機一体として市場には参入されるんですか?
金岡博士:エンターテインメントの分野は、すごく有望な市場だと思っています。結局、ロボットを何のために作るか考えた時、最終的には実業ですよね。ロボットが何か作業をすることにより、その作業の価値を提供するというのが最終的な目標であるというのは変わりません。しかし、実業にたどり着くまでの道が比較的長いこと、さらに、ロボットの重要な属性が汎用性であることを考えると、実作業に行く前に、まずは人型重機を体験してもらうという価値が提供できると思うんです。例えば、テーマパークなどに人型重機のプロトタイプを提供する形でもいいですしね。
杉原:たしかに! メガロボット大戦みたいなアトラクションは実現できそうですもんね。来年、再来年くらいになんか出てきそうな予感がします。何かしらの機会があれば、人機一体としても協力していく感じですか?
金岡博士:そうなるとどうだろう(笑)。やるなら自分たちでやるでしょうし、大戦そのものも上手くルールを作らないと中々難しいと思います。エンターテインメントとして、ちゃんとプロデュースできるのならば、やってみるのも有りかもですね。
杉原:例えば、人機一体リーグみたいなものが仮にできたとした時に、やはり持っているテクノロジーをある程度シェアしていかないと、対戦相手ができないと思うのですが。それをどうやって切り離し、ビジネスに繋げていくかとかはお考えですか?
金岡博士:我々が持っている技術をどこまで開示し、どこまで守るかというバランスについては、他の技術と比べて特殊なことはなく、いわゆる一般的な感覚と同じだと思っています。開示する部分は特許を取ればいいし、それにそぐわない技術はブラックボックスにしておけばいい。
杉原:でも、なかなかブラックボックスとして技術を守るって難しいじゃないですか。
金岡博士:そうかもしれませんが、できるとこはできますよ。
杉原:それはプログラミング?
金岡博士:ソフトウェアとハードウェアの両方ですね。
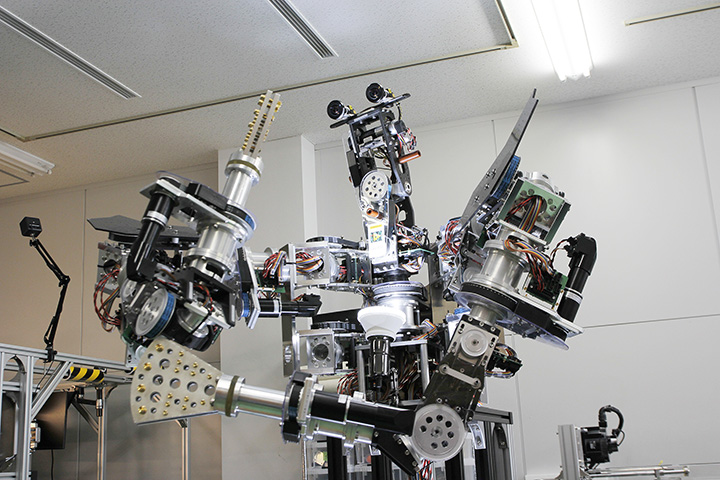
作業機(スレーブ装置) “MMSEBattroid ver.1.0”
杉原:先ほどマスタスレーブシステムを操縦させてもらった印象として、スレーブロボット(作業機)の方は、既に実用化がなんとなくイメージできるのですが、マスタ装置(操作機)の方はもっともっと変わっていきそうな気がするのですが。
金岡博士:どうでしょう。マスタ装置に求められるのは、スレーブ装置との一対一の対応のみです。マスタ装置における操作が、必ずしも人間の普段の動作と同じ必要はありません。もしかしたら、むしろ似ていない方がいいのかもしれませんし。
人間が普段している動きを、ロボットも出来ますというのは、実は個人的にあまり好きではないんです。それは感情としての好き嫌いでということではなく、合理的ではないように思うんです。要は、我々のマスタスレーブシステムにおいては、操作者の身体能力は、単なるインタフェースです。だから力が強いとか弱い、可動域が狭いとか広いというようなことはあまり関係ありません。その人なりのインターフェースとして一番使いやすいスイートスポットを使えばいいだけの話だと思っています。つまり、操作者の身体のスイートスポットによって、マスタ装置の設計自由度は、最初からある程度制約されています。
そしてさらに、人間の普段の身体スキルを使ってロボットを動かせますっていうのは、ロボットの動きがある意味、普段の身体スキルに制約されてしまうということになるので、あまりやりたくないですね。それよりはむしろ、ロボットを操るためのスキルを普段の身体スキルと関連付けずに、新たなスキルとして習得して欲しいと思っています。
杉原:運転免許証みたいなものですね。
金岡博士:そうです。非常に端的な例を挙げれば、車を走らせるために、運転者が「生身で走る動作」をする必要はない、ということです。車を走らせるためには、それにあった合理的な操作の仕方があるわけで。
杉原:車っていうのは、資格的や常識的な部分、あとはある程度の運転技術が必要というところだと思うんですけど、人機一体の考えている資格っていうのは、幅広く誰でも取得できるくらいのものに持っていくのですか?
金岡博士:そこは逆に狭めるべきだと思います。少なくとも最初の段階では、きちんと高いスキルを持った人だけに制限をして、ロボットを扱うことがどういうことかっていうのをきちんと広めて欲しいです。誰でも簡単にロボットを操れます、では逆にマスタスレーブシステムの存在意義を毀損します。むしろ、人型重機を操作する「プラチナライセンス」を持っている人が、その高いスキルで尊敬されるようにしたい。
杉原:僕は操れる人の中に入りたいです!(笑)
金岡博士:そう! だから、操りたい人に操ってもらえればいいんです。皆が皆、巨大ロボットに触れる必要はない。今は誰でもスマートフォンを持ったり、コンピュータを持っている時代ですが、少なくとも巨大ロボットはそのような存在にはならないじゃないですか。それってどこまで行ってもスペシャリティであって、いわゆるコモディティではないんですよ。
杉原:だとしたら今からそのスキルを練習しておかないとですね(笑)。
金岡博士:一方でそれは、我々の狙いでもあります(笑)。要は、3Kみたいな職業がなんで嫌われているのかっていう大きな要素はフィジカル面なんですよね。でも、ロボットをその間に挟めば、フィジカル面での不快感を取り除くことが可能になってくる。スキルだけを人が発揮すればいいわけです。しかもそのスキルは、人が元々持っているスイートスポットを使えばいいから、純粋に操る能力だけが問われることになると考えています。
“人機一体”という社名が物語るように、人が機械を操作することで不可能を可能にすることを追い求める金岡博士。どの言葉にも決してぶれることのない強い意志を感じることができた。近い将来、災害地などで実際に活躍するロボットを目にする日がきっと来るだろう。
金岡博士
(株式会社人機一体 代表取締役社長 兼 立命館大学 総合科学技術研究機構 ロボティクス研究センター 客員研究員)
ロボット制御工学者、発明家、起業家、武道家。専門は、パワー増幅ロボット、マスタスレーブシステム、歩行ロボット、飛行ロボット等。ロボット研究開発の傍ら、辛口のロボット技術論を吼えることがある。マンマシンシナジーエフェクタ(人間機械相乗効果器)という概念を独自に提唱し、あまり相手にされないながら、十年来一貫してその実装技術を研究・蓄積してきた。そして今、業を煮やして、ビジネスとしての社会実装に挑戦するため「株式会社人機一体」を立ち上げた。
http://www.jinki.jp/