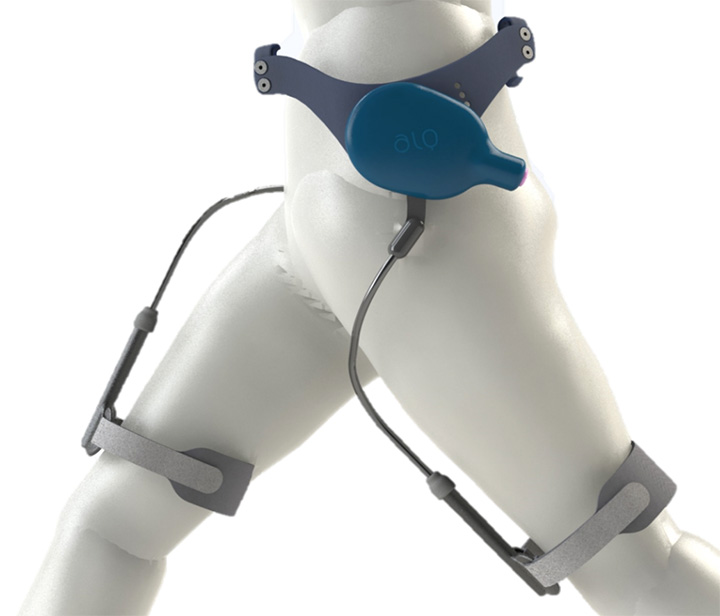
電気、モーターやバッテリーなどを一切使わず、振り子とバネの力だけで、歩く力をアシストする『ACSIVE(アクシブ)』。これは、名古屋工業大学の佐野明人教授が、15年以上にわたり研究・解明してきた「受動歩行」の理論を基に、同大学と株式会社今仙技術研究所が約4年の歳月をかけて共同研究・開発した世界初の“無動力歩行支援機”だ。2017年6月に発売された『aLQ(アルク)』も、無動力で歩行をアシストする歩行支援機だが、ACSIVE(アクシブ)のノウハウをベースにさらなる進化が加わったという。両者の違いとは?揺らす支援とは?その先の未来に描く世界とは?受動歩行ロボット研究の世界的権威、佐野教授とHERO X編集長の杉原行里(あんり)の対談をお届けする。
ACSIVE(アクシブ)とaLQ(アルク)のすみ分けとは

佐野:ACSIVE(アクシブ)とaLQ(アルク)は、いずれも、振り子とバネの力だけで、歩く力をアシストする無動力歩行支援機ですが、少しすみ分けをしています。製造背景についてお話すると、ACSIVE(アクシブ)が、義足や電動車いすなどの福祉用具の開発を手がける今仙技術研究所であるのに対し、aLQ(アルク)は、その親会社であり、自動車部品の製造を専門とする独立系メーカーの株式会社今仙電気製作所で行われています。
また、ACSIVE(アクシブ)は、脳卒中などで体の片側にまひが残る方、足の振り出しが困難な方など、基本的には、歩行に障害のある方をアシストするためのもの。対して、aLQ(アルク)は、ACSIVE(アクシブ)をさらに軽量化し、健康な方にも、より健康を目指す方にも、手軽に使えるように開発したものです。毎日のウォーキング、レジャーや旅行など、歩くことを楽しみたい方や、生活範囲を広げたい方の歩行をアシストするためのものです。装着感も、ACSIVE(アクシブ)は膝下にしっかりと、aLQ(アルク)は膝上に軽やかに留めるという違いを出しています。
杉原:ユーザーの方からはどんな反響がありますか?
 佐野:ご高齢の方がaLQ(アルク)を使うと、「10年くらい前に戻った気がする」とおっしゃるケースもあります。その頃の歩き方を明確に覚えているわけではありませんが、「機械に作られた動きではなく、自然な感じで歩きやすくなった」という声を多くいただきます。
佐野:ご高齢の方がaLQ(アルク)を使うと、「10年くらい前に戻った気がする」とおっしゃるケースもあります。その頃の歩き方を明確に覚えているわけではありませんが、「機械に作られた動きではなく、自然な感じで歩きやすくなった」という声を多くいただきます。
杉原:階段の昇り降りも、アシストできるのですか?
佐野:バネの力が継続してかかるようになっているので、下支えで脚をシュッと上げてくれます。手すりを引き上げないと上がらなかった脚が、わりとトントン上がるようになったという方もいますね。カーボンのフレームを、太ももから膝下まで沿わせてあるので、階段を下る時に起きる膝のふらつきは抑えられます。ただ、あくまで歩く力をアシストするためのものなので、膝や足首にかかる負担を直接的に軽減することはできないのですが、「膝の痛みが減った」と言われる方も中にはいらっしゃいます。
手軽なaLQ(アルク)に、予想外の反響!?

佐野:ACSIVE(アクシブ)の場合は、歩行に障害のある方が同伴者と来られるケースがほとんどです。普段の歩き方や病状など、時間をかけてお聞きした上で、試着を行っていきます。良ければ、購入されるという流れなのですが、aLQ(アルク)の方が価格的にも手頃ということもあって、購入される方の感覚が、ACSIVE(アクシブ)とはまた少し違うんですね。ふと立ち寄られた店で試着された方がそのまま付けて帰られたり、二台目を買うために再度問い合わされた方もいます。旦那さんなのか、親御さんなのか、どなたのためのものなのか分からないのですが、二台目を購入するケースは初めてだったので驚きました。
杉原:(スマートフォンを触りながら)対談中にすみません。今、僕aLQ(アルク)を買っちゃいました(笑)。先日、退院したばかりの叔父に贈りました。
佐野:ありがとうございます(笑)。
杉原:aLQ(アルク)をつけたまま、走れますか?
佐野:走っても、違和感はありませんが、走りをアシストするためには、また別の創意工夫が必要になってくるかと思います。少し関連することを言いますと、リオパラリンピックの100×4mリレーで銅メダルを獲得した陸上競技のある障がい者アスリートの方が、ACSIVE(アクシブ)を使ってくださっていました。走る前に、足さばきのイメージトレーニングとして使われていたようです。
ACSIVE(アクシブ)もaLQ(アルク)も、人が使うものなので、個々の体に起きてくる変化もその数だけあるでしょうし、私たちが当初、予想もしなかったような使い方も考えられるでしょう。こうした使い方も含めてデザインだと思うので、ユーザーの方々からいただく貴重な生の意見を精査して、今後の開発に活かしていきたいと思います。
佐野明人(さの・あきひと)
国立大学法人 名古屋工業大学
大学院工学研究科 電気・機械工学専攻 教授
1963年岐阜県生まれ。1987年岐阜大学大学院工学研究科修士課程修了。1992年博士(工学)(名古屋大学)。2002年スタンフォード大学客員研究員。受動歩行・走行、歩行支援、触覚・触感などの研究に従事。2009年「世界で最も長く歩いた受動歩行ロボット」でギネス世界記録認定。2014年9月、世界初の無動力歩行支援機『ACSIVE(アクシブ)』を実用化。2017年6月、ACSIVE(アクシブ)をベースに、健康づくりのために、誰もが手軽に使える無動力歩行アシストをコンセプトに開発した『aLQ(アルク)』を発表。2010・2011年度日本ロボット学会理事、2015・2016年度計測自動制御学会理事。日本機械学会フェロー、日本ロボット学会フェロー。
株式会社 今仙技術研究所(ACSIVE)
www.imasengiken.co.jp
株式会社 今仙電機製作所(aLQ)
www.imasen.co.jp/alq.html