文部科学省が昭和39年から行なっている子供の「体力・運動能力調査」によれば、昭和60年頃を境にして、子供たちの走る力、投げる力、握力といった基本的な運動能力は、全国的に低下の一途を辿っているという。また運動をする子供と、しない子供の二極化も著しいといわれる。もちろん、その原因を探り改善を図るための取り組みは、さまざま行われているが、近年注目を浴びるのは、AIやセンシングなどのテクノロジーを駆使したプロジェクトの数々だ。今回は、お手軽に、しかも楽しく子供たちの適正が診断できる「DigSports(ディグスポーツ)」に着目して、この画期的なサービスの利点と、そこから見える未来を考えてみた。
ライフスタイルの変化で
子供の体力は低下の一途
“日本は、子どもの運動能力が年々低下している”。そういわれて久しいが、その原因はさまざまだ。根底には、高度情報化社会によるライフスタイルの変化があることは間違いない。生活の利便性は高まったけれど、その反面、運動をする機会が確実に減っている。代わりに、子どもたちのスクリーンタイム(ゲームやスマートフォンの利用時間)は増加傾向にある。
ほかにも、自由に運動ができる公園や施設が限られている、地域に指導者がいないといった環境的な要因や、また、食習慣の乱れなど、子どもの体力低下を招く要素は多々ある。
そんな現状に対する危機感と、東京オリンピック・パラリンピック等のビッグイベント開催に伴うスポーツへの関心の高まりなどを見据えて、株式会社電通国際情報サービス(以下ISID)が2017年に開発したのが、子どもの運動能力をAIで自動測定し、個々のスポーツ種目の適正を判定するシステム「DigSports」である。

近年、欧州を中心に発達してきたスポーツ分野におけるセンシング技術の導入は、日本でも少しずつ広がりつつある。
使い古された根性論などではなく、合理的に選手の能力やパフォーマンスを測定し、可視化することで適切な指導を行う。そんな取り組みは、例えば、全国に名をとどろかせるスポーツ強豪校では、当たり前に浸透してきている。
一口にセンシングといっても、方法はさまざまだが、「DigSports」は、I C搭載バンドを装着して(記憶媒体のため、近くに置くだけでも構わない)モニターの前に立つだけで、文部科学省の新体力テストに採用されている5項目(反復横跳び、垂直跳び、50メートル走、ボール投げ、持久走)の自動測定ができる。
注目すべきポイントは、いくつも器具を装着する必要がないお手軽さ、そして、5m四方のスペースさえあれば実施可能というコンパクトさだ。
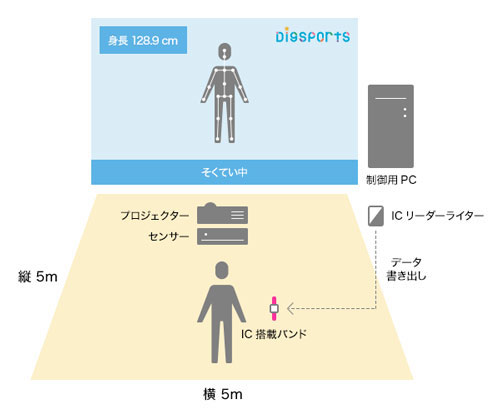
小スペースでモニターを見ながらお手軽にセンシングできるのが、「DigSports」の強み。
面倒な機器装着がなく
さまざまな測定ができる
ISIDが同サービスを開発した経緯は、先述のとおりだが、このプロジェクトには、スポーツ嫌いの子どもたちが自分にマッチしたスポーツに出会うことで、スポーツを好きになってほしい、そして、できれば生涯スポーツを、長く楽しんでほしいという期待も込められているという。
もちろん、適正に合致したスポーツにのめり込むことで、将来のトップアスリートが生まれる可能性もある。
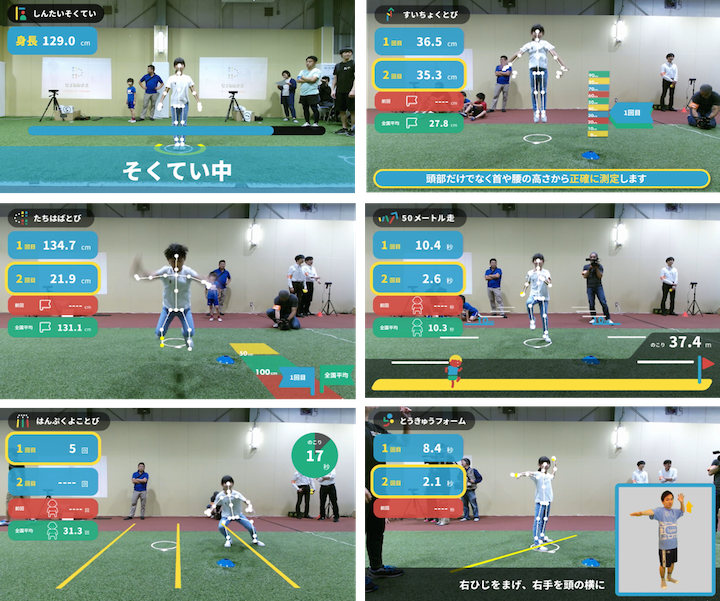
代表的な体力測定のメニューは全て網羅されている。オプションで投球フォームの指導なども受けられる。
わずか5m四方のスペースで、50m走や持久走の記録を測定できるというのは興味深いが、そこには、スポーツトレーニング専門家として名高い、遠山健太氏(全日本スキー連盟フリースタイルスキーフィジカルコーチ)が考案したスポーツ診断メソッドを応用したアルゴリズムが活用されている。
測定者の体格(足の長さなど)や、膝を上げるスピード、垂直跳びの結果などから、数値を割り出すため、大きなスペースも細かなモーションキャプチャも不要なのだ。
各々の種目の測定結果からAIで運動能力が分析され、特徴を割り出すとともに、自分の属するタイプは動物で表現される。わかりやすい図表で結果が出てくるため、子どもも理解しやすいのが大きな特徴だ。
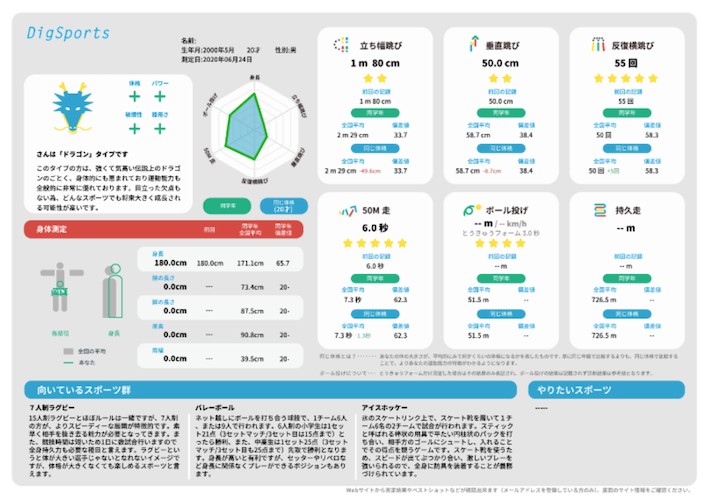
測定結果はすぐにアウトプットされる。まるで星占いのような動物のタイプ分けや見やすい図表入りというのもユニークだ。
地域に根ざしたカスタマイズで
さらに提案性を高める
センシングというと、限られたスポーツエリートを効率よく育成するために使われる技術というイメージがあるが、「DigSports」は、あくまで、お手軽に、そしてわかりやすく子どもたちの“得意”を見つけ出すために活用されている。いわば、スポーツを始めるきっかけを提供しているのだ。
ただ、「DigSports」の対象者は、必ずしも子どもだけではない。小学生以上であれば、基本的には誰でも活用ができる。運動能力を分析する際の平均データは、70歳までインプットされているため、高齢者であってもトライすることも分析することも可能だ。
また、これまでさまざまな自治体と、地域に根ざした活用法も模索してきた。例えば、鹿児島県沖永良部島の知名町で、スポーツ庁と取り組んだ成人のスポーツ習慣化促進事業では、島に住む子育て中の女性を対象に「DigSports」が活用された。
子育て等の理由でスポーツから遠ざかる成人女性は少なくないが、改めて自分の適正を測定、分析することで、またスポーツを始めるきっかけができる。このプロジェクトでは、20〜40代の女性が「DigSports」を通して、新たなライフスタイルを見つける機会を得たという。
これからの「DigSports」の課題としては、知名町での事例のように、地域の特性とニーズを踏まえた活用法、そしてそれに合わせたカスタマイズなどが考えられる。
現在は、分析結果から提案する適正スポーツは74種類。ただ、場所によっては、気候などの影響により、競技人口が極端に少なかったり、指導者がほぼいないというスポーツがあることも考慮して、より地域にマッチした提案が望まれる。
そんなアップデートがなされれば、今後、「DigSports」を媒介にした官民一体のプロジェクトやイベントが、全国で盛り上がることも期待できる。
“得意を見つける、得意を広げる”。当初のコンセプトを具現化したこの画期的なシステムが、あらゆる場所で、より簡単に活用できるようになれば、スポーツを幼少期から始める人口も増える可能性がある。
加えて、国民全体に広がった“体力低下”という大きな問題解決の糸口が見えてくるかもしれない。
関連記事を読む






































