ITやエレクトロニクス関連技術を中心にした国際展示会CEATEC(Combined Exhibition of Advanced TEChnologies)。毎年10月、幕張メッセで開催されてきたアジア最大級を誇るこの総合展は、昨年(2020年)、コロナ禍の影響でオンライン開催を余儀なくされたにもかかわらず、延べ来場者数は15万人強を記録した。その盛況ぶりからは、国内外からの注目度の高さが窺えるが、果たしてその理由はどこにあるのか? エグゼクティブプロデューサー・鹿野 清氏のお話を交えながら、次なるフェーズを迎えつつあるCEATECの新たな魅力と、そこから見え隠れする未来図を考える。
時代とともに形を変え
進化してきた展示会
前身となるエレクトロニクスショー(1964〜1999年)とCOM JAPAN(1997〜1999年)が統合して、CEATEC JAPANが始動したのは2000年。それから20年以上が経過した現在、同イベントの掲げるビジョンは、かつてのそれとは様変わりしている。鹿野氏は、そのターニングポイントは、2016年にあるという。
「CEATECは、日本の産業の移り変わりとともに成長してきた展示会ですが、2016年にそれまでのテーマとなっていたデジタル“家電” から、CPS(Cyber-Physical System)とIoT(Internet of Thing)に大きく舵を切りました。そこから特に意識をしているのが、来場者と出展者、そして出展者同士が“共創”できる場を提供するということです。少しずつですが、新たなイベントとして成長してきた自負があります」
2019年までは、毎年10月に幕張メッセにてリアル開催されていた。
昨年は、コロナ禍というこれまでにない事態に直面し、完全オンラインで開催。にもかかわらず、来場者数は15万人(延べ)、出展社数も350社を超え、これからの未来を担う学生から大手企業の役員、政府関係者まで、様々な方々の訪問があった。それはCEATECが、ユニークなアイデアや技術に出会える貴重な機会として、着実に浸透してきた表れでもある。興味深いのは、新規の出展企業が増えている点だ。
新規企業、スタートアップの
参加が目に見えて増加
「近年は、電子部品やIT関連企業の出展に限らず、建設機械メーカーやメガバンク、ゼネコンといった異分野の出展企業が増えています。しかも全体の3〜4割は、新規出展という状況です。加えて、国内外のスタートアップ企業の参画も増加傾向にあります。まだ創業して間もない企業が、大手企業に自らの技術やアイデアを訴える場として、CEATECが利用されてきている。それも年を追うごとに顕著になっています」
国内外のスタートアップ企業の参加は、まさにあらゆる“共創”が生まれる起爆剤となりうる。それが増加しているのは、CEATECにとって好ましい傾向であるが、背景には、JETRO(日本貿易振興機構)との連携がある。特に海外スタートアップの積極的な誘致活動が功を奏している。

CEATECエグゼクティブプロデューサー・鹿野 清氏
「昨年の実績で言いますと、スタートアップ企業の参加は、約170社。そのうちの海外企業は半分弱です。これまでも多かった中国、台湾、香港といった近隣アジアの出展企業に加えて、近年では欧米企業の出展も増えています。JETROとの連携で、グローバルな視点での誘致活動も確実に実を結んできました」
欧米のスタートアップ企業が、アジア進出も見据えた市場開拓、そしてアイデア交換の場としてCEATECをチョイスし始めている。その根底には、日本企業の意識の変化もあるようだ。いわゆる“オープンイノベーション”を推し進めようという動きが、ようやく日本企業にも広がってきているのだ。
日本にも浸透してきた
“オープンイノベーション”
「諸外国では、オープンイノベーションは常識化していますが、日本のITエレクトロニクス産業や家電メーカーでは、技術の“囲い込み”などの文化が根強く、それが世界から遅れを取る一因にもなっていました。ようやく近年になって、日本企業も外から柔軟に多くのものを取り入れようとする機運が高まり、積極的な企業も増えています。外に門戸を開く企業が多くなれば、必然的に提案をするスタートアップも増える。徐々にそういった流れができています」

昨年(2020年)のCEATECオンラインサイト
日本は、狩猟社会、農耕社会、工業社会、情報社会に続く新たな社会を、“サイバー空間とフィジカル空間を融合させることで、社会課題を解決して経済発展を遂げる社会”として「Society 5.0」を掲げている。CEATECも、そんな来るべき新たな社会「Society 5.0」を見据えた展示会としての役割を掲げ、柔軟に変化を遂げているのだ。
「日本国内を見ても、大手企業のビジネス構造は、ここ5年余りで大きく変わってきたと感じています。簡単に言えば、課題解決型、すなわちソリューションを含めた製品提供が当たり前になりつつあります。CEATECも単なる製品展示というよりも、近年は、よりソリューションに重きを置いた展示スタイルへと変貌しています。オンライン開催でもインパクトのあるソリューション提案をするには何が必要か? インフラ整備も含め、いまはそこが大きな課題です」
世界中のスタートアップから
ソリューションを募集
さらにCEATEC 2021では、「Japan Challenge for Society 5.0」と称したコンテストも行われる。これは、JETROが主催し、日本の3つの社会課題(チャレンジ)を提示して、そのソリューションを世界中のスタートアップから募集するという画期的な取り組みだ。社会課題解決型ビジネスは世界的な潮流になっているが、それを日本が掲げるSociety 5.0とスマートに結びつけるべく、立ち上げられたプロジェクトだ。

「3つの社会課題は、CEATECの主催団体である、JEITA(電子情報技術産業協会)の会員企業やJETROのお客様約1000名にアンケートを実施して、特にニーズの高かったものを選んでいます。6月から7月末にかけて、スタートアップによるソリューション募集を行いました。今後、応募されたソリューションを選定して、最終的には45社ほどCEATEC 2021にご招待する予定です」
この取り組みは、まさにオープンイノベーションを体現するとともに、CEATECの活性化にも直結するとてもユニークなものだ。ちなみに、気になる3つの社会課題とは、1. 環境配慮型社会への転換、2. 労働力減少への対応・生産性向上、3. 都市・地域のバランスの取れた成長、というもの。どれも根が深い課題だが、このコンテストを通して、解決策の手がかりが見つかればという期待が膨らむ。
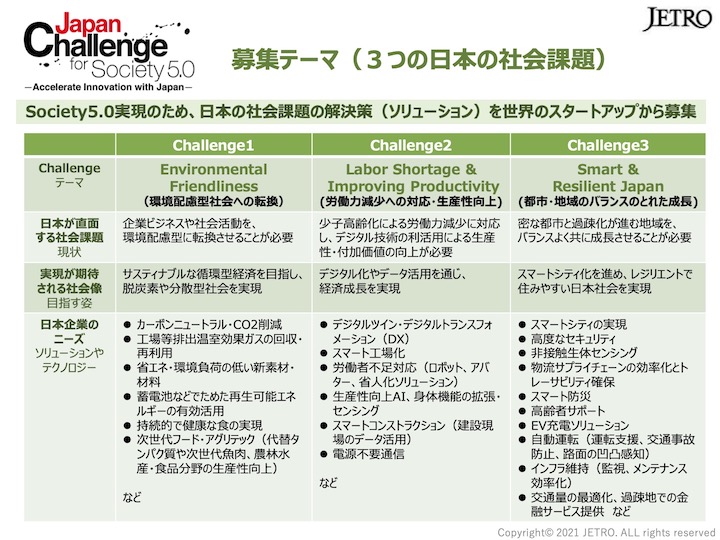
「Japan Challenge for Society 5.0」で募集された3つのテーマ概要。
「『Japan Challenge for Society 5.0』の募集を締め切ったところ、50を超える国・地域のスタートアップ数百社からソリューション提案がありました。このコンテストは、斬新なアイデアや技術に出会えるだけでなく、今まで交流のなかった国や地域の企業を積極的にお呼びする契機になると考えています。ここを出発点に、日本の企業や自治体との商談に結びつけられれば本望です」
オープンイノベーションの推進や、それに伴った産業構造の変化、SDGsに向けた取り組み、新型コロナウイルスの蔓延などと、ビジネススタイルや人々の価値観が大きくシフトチェンジしてきたここ数年。
それに伴い、アジア最大級を誇る総合展CEATECもその在り方を進化させてきた。よりスタートアップ企業との新しい結びつきが期待できる今年のCEATEC 2021 ONLINE(10/19〜22)では、これまでにない更なる“共創”が生まれるに違いない。
関連記事を読む