今回は、先日HERO Xでも記事が公開された、“すべての人に動く喜びを与える”をモットーに義足開発するXiborg代表の遠藤謙氏と、弊誌編集長・杉原行里(あんり)の対談をお届け。 実際にXiborg立ち上げにも関わった杉原だからこそ感じる鋭い視点から、義足を通じて世界に貢献するその意味を紐解いてもらった。それでは、友人同士ゆえに話せるざっくばらんな対談をお楽しみください。
杉原行里(以下、杉原):まずは、Xiborg所属の佐藤圭太選手、リオデジャネイロ・パラリンピック男子400mリレーでの銅メダル獲得おめでとうございます。
遠藤謙(以下、遠藤):ありがとうございます。
杉原:実際にテレビで手に汗握りながら応援していたんだけど、正直な気持ち、もっと上を狙えたんじゃないかなと感じたのが本音です(笑)。それは、エンジニアに対してもう少しハードな要求を誰かがしなくてはと感じているからこそなんですが。そこを踏まえて、同じく昨年開催されたサイバスロンでの結果は、世の中はどう思っているかは分からないけど、個人的には「魅せたな」と感じています。2015年からリハーサルを始め、少ないリソースでよくあそこまで完成させましたね。
遠藤:そう!本来作っている人間がこんなことを言ってはいけないと思うんですが、あの義足の完成度に誰も気づいてくれていないんです(笑)。
杉原:逆にあえて厳しい言い方をすれば、やっぱり自分たちのやっていることが世間に伝わらないと、あまり意味がないとも感じていて。
遠藤:よく分かります。
杉原: 本人たちが一番分かっていますよね。だとしたら、2020年の東京パラリンピックに備え、エンジニアを増やして完成へのスピード感を上げていくようなことは考えているのかな?

Xiborg代表の遠藤謙氏
遠藤:そこに関してはものすごく考えたし、それが正解かも分からない中導き出したのは、やっぱり僕は、自分で全てをハンドルできる規模に抑えながら面白いことをやっていくのが合っているんじゃないかという答えに辿り着いています。スケールアップするような事業の中に自分がいると、恐らく好きなことが出来ないんじゃないかという直感を信じました。とはいうもの、今の体制ではエンジニアが少なすぎるのも分かっているので、あと2、3人増やし少数精鋭で進めていきたいと思っています。

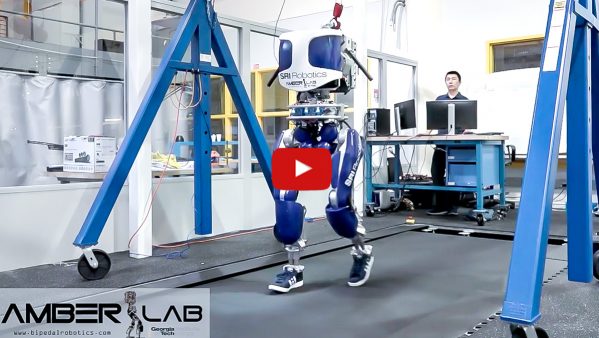
左 2016サイバスロン出場時の様子。右 Xiborg社で開発した義足。写真提供:http://xiborg.jp/
義足を通じて世界に貢献
杉原:次に聞きたいなと思っていたのは、“D-Leg (https://www.facebook.com/DLegJapan/)*1”について。各発展途上国の義肢装具士と連携して義足ビジネスでフォローしていくというプロジェクトについての進捗を知りたいなと。
*1 D-Leg(ディーレッグ)
発展途上国を中心とした世界中の切断障害者のために、安価で高機能な適正技師装具の開発やその普及を行っている、MIT D-lab、MIT MediaLabからスピンオフしたNPO団体。
遠藤:D-Legも自分が持っているリソースが限られている中で始め、どうやったら進めていけるかということをかなり考えました。MIT(マサチューセッツ工科大学)にいた頃は授業の一環としてやっていたから学部生の人たちと進めていたんですね。その時は時間が無限にあったので、まずはやる気で進めていくというプロジェクトだったんです。
それから帰国し、日本でこのプロジェクトを継続するためにはどうしたらいいかと模索していたところ、東京工業大学の学生が毎年インドに行っているから、何かできないかという話になったんです。そこで僕も義足を作り彼らに持って行ってもらい、僕が行かなくてもインド側のパートナーと手を組んでテストをするというサイクルが、去年の3月から再開し、今はいいペースで回せるようになってきているところです。
杉原:謙が言っている“動く喜び”というものを必要としている一番つま先にいる人たちって、義足なんか夢のまた夢と思っているそういう途上国に住んでいる方たちかなって思うと、D-Legってつくづく素晴らしいプロジェクトだと感じていて。だからこそスピード感を持って進めてもらいたいし、協力できることはどんどんしていきたいと思っています。もちろんサイバスロンは面白い試みなんだけど、実装をすぐにしなければいけないという部分と、大幅なコストが掛かるわけじゃないですか。そういう意味では現実的ではないとういうかね。
ビジネス面から見た、Xiborgの目指すべきところ
やはり企業としてやっている以上は、収益を上げなくてはいけない。なぜならニッチなことをやっているからこそ、先駆者はこれから同じ道を目指す人間にも夢を与えなくてはいけないという使命を持っているからだ。
杉原:会社設立から4年目に入り、企業としての成長はどう感じているのかな?
遠藤:もの凄くというわけではないけど、少しずつ伸びてはきているかな。ただ、2020年の東京オリンピックを目処に世の中がまた違う方向に動き出すはずなので、それ以降のことを視野に入れ、ちゃんと価値を見出す研究をしていかないと、とは考えています。正直、ビジネスとして収益を上げることに特化して、東京オリンピック・パラリンピックまでコンテンツを作り続ければ、間違いなく儲かると思うんだけど、やっぱり僕はそれに魅力を感じることができない。自分たちは、義足周辺の物に対して持っているテクノロジーを他にも展開できるよう突き詰め、しっかりと研究していく方向で判断しました。
なので、言っているように飛び抜けた成長はまだしていないけど、2020年以降に向けたやるべきことを、今まさに進めている最中です。物を作っていく過程の中で世の中のために役立つものがあり、それを横展開できた瞬間がもの凄く楽しいので、だからその瞬間を味わい続けられるように頑張っていきたいなと。

HERO X編集長 杉原行里
エンジニアとしての遠藤氏の本質
杉原:よくメディアでは、義足エンジニアとして紹介されていますけど、謙のことを実際にそう思ったことがなくて(笑)。それについてはどう感じているのかな?
遠藤:義足だけのエンジニアではないから、はじめは違和感あったけど今は慣れました(笑)。正直肩書きはどうでもいいです。僕は、生粋のエンジニアなので、まだまだ物作りに対する欲は尽きません。もっと時間をかけていい物をたくさん作りたいですね。欲深い人間なので(笑)。
杉原:僕らが共通して言えることは、お互い格好いい物が好きで、さらにそこにはこじ開けたい穴があるってこと。だからこそHERO Xとして色々なプロダクトやエクストリームなスポーツなどをフォーカスしていく中で軸があるんだけど、それは、記事として取り上げているモノやコトを文化として日本に根付かせていくために、定期的にイベントを開催することなんです。
失敗したとしてもそれを続けていかないと、意味のないものになってしまうような気がしていて、紹介してはい終わりじゃダメだなと。出る杭は打たれるじゃないけど、これからは人がやらないことをやり続けていかないと。その一つの方法が、エンターテイメントとしての見せていくことではないのかと感じています。
そこで最後の質問なんだけど、例えばHERO Xが立てた誰かと謙が組んで新しいものを作るとしたら、どんな人がいい?
遠藤:嫌われ者がいいです。なぜなら、無いものに対してチャレンジするのがすごく面白いと思っているので。その意味は二つあって、一つは新しいことをやろうとする人。もう一つは、失敗を恐れない人。そういう人って日本では煙たがられる傾向にあるんです(笑)。
“すべての人に動く喜びを与える”。このような志は誰もが持てるものではない。なぜならきっと、多くの人が他の誰かがやってくれればいいと思っているからではなかろうか。もしかしたら、少しの思いやりを世界中の人、全員が持てれば、もう少し優しい世の中になるのではと、遠藤氏の話を聞いていると少し夢を見てしまう自分がいた。理想や夢を口にすると冷めた目で見られることを恐れずに信念を貫く遠藤氏の動向を、今後もHERO Xでは追ってみたいと思う。
Xiborgオフィシャルサイト
http://xiborg.jp/