
アスリートのための義足というと、多くの人はまずランナー用のものを思い浮かべるのではないだろうか。過去のパラリンピックでも義足で華麗にトラックを駆け抜ける選手たちが大きく話題となった。しかし義足の可能性は陸上競技だけには留まらない。今回紹介する『Marie-T』は、なんと、バレリーナのための義足だ。
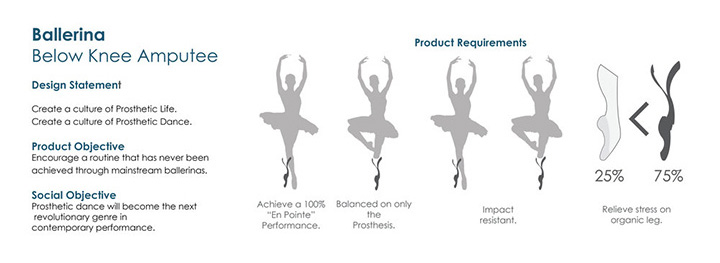
つま先で立つポワントはバレエを代表する優美かつ軽やかなポジションだが、足と足首を大きく歪ませるため、幼少期から練習を積んでも、常にこのポジションで演じ続けることは極めて難しい。数多くの著名なアーティスト、デザイナーを輩出したニューヨーク州ブルックリンの大学Pratt Instituteのデザインチームはポワントを100%の精度で演じることができたら何が起こるか、バレエはどう変化するか、クリエイティビティがどう刺激されるか、という狙いで『Marie-T』を開発した。
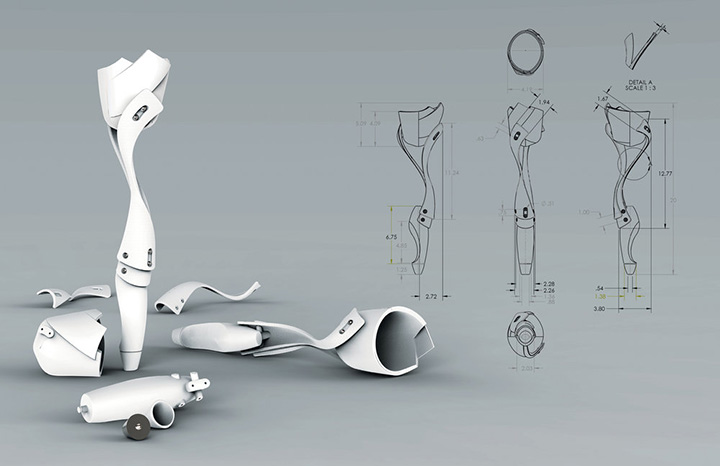
ポワントのポジションはふくらはぎからつま先に至るまで一切曲がらずに伸びているため、衝撃を吸収できない。この問題を避けるため、『Marie-T』はチータと呼ばれる義足と同じ湾曲の仕組みを採用しているが、チータはアスリートが後ろに転ばないようにするために、バランスを維持するべく常に運動し続けなければならない。そこで、『Marie-T』は湾曲する方向を反対にすることで、一度姿勢を止めてから、また次の動きへというバレエには欠かせない流れを可能にした。
義足によって加えられた重みはダンサーが踊り続けるのに弾みをもたらし、重力が下がることで、バランスを維持しやすくなっている。
『Marie-T』が描くバレエの未来は、我々が想像するよりもずっと先にありそうだ。







































