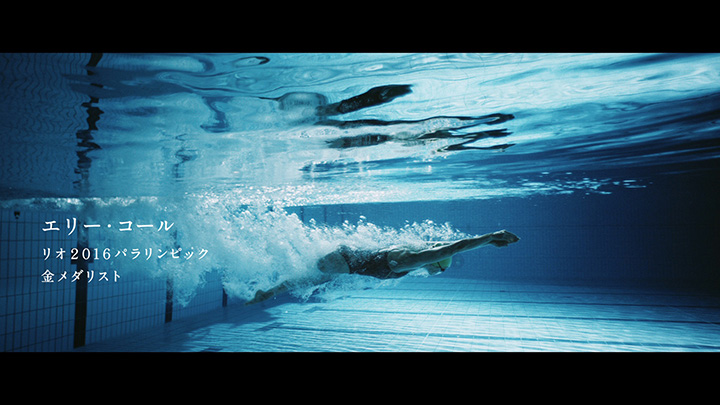
リオ2016パラリンピック水泳競技に日本代表として出場した一ノ瀬メイ選手と、競泳大国オーストラリア代表のエース、エリー・コール選手の2人のスイマーを起用した新CM、One Sky『一ノ瀬メイ×エリー・コール』篇が、2018年4月18日(水)から全国で放映されている。
東京2020 オリンピック・パラリンピック競技大会まであと2年と迫り、様々な取り組みがされているが、東京2020 を迎えた時、果たして私たちに映る景色は描いていた未来そのものであろうか。それは、便利で暮らしやすい街? それとも、生きやすい世の中?──その向かうべき未来についていま、個々人が考えていくべき時期に差し掛かっている。
そもそも、大会の意義や大会を行うことでの社会創生について、考える人は少ないだろう。東京 2020 大会ビジョン基本コンセプトの1つに、“多様性と調和” があげられていることはご存知であろうか。「人種、肌の色、性別、性的指向、言語、宗教、政治、障がいの有無など、あらゆる面での違いを肯定し、自然に受け入れ、互いに認め合うことで社会は進歩。東京2020 大会を、世界中の人々が多様性と調和の重要性を改めて認識し、共生社会をはぐくむ契機となるような大会とする。」(東京 2020 組織委員会 HP より引用)
「考えたり意識をしたりする、機会が少ない」もしそのように感じている人が多いとするならば、ここからあと2年、より人々の生活に接点のある企業・自治体の取り組みは注目していきたいところだ。

提供:大和ハウス
今回ご紹介したCMは、大和ハウス工業株式会社が 2020年とその先の未来に向けたコミュニケーションを展開する『One Sky』の取り組みのひとつ。同社は2016 年より、東京 2020 オリンピック・パラリンピック競技大会オフィシャルパートナー (施設建設&住宅開発) として大会の成功を応援しているが、さらに2017年より『One Sky』“多様性の時代だからこそ、同じ空の下、一人一人が違いを認め合い、尊重し合えるような「あたらしい景色」を作りたい” とのコンセプトで、様々なコミュニケーションを展開している。

提供:大和ハウス
提供:大和ハウス
本CMでは、一ノ瀬メイ選手とエリー・コール選手の美しい泳ぎ姿が披露されるなか、トップスイマー2人が持つ「障がいに対する社会の意識や偏見を変えていきたい」という強い想いが伝わるストーリーが展開。 最後のナレーションを務めた俳優の松坂桃李さんも、その想いが印象的であったとコメントしている。
企業はこのように、個々人が意識をするための機会をつくり、伝え手となっているが、“誰もが自分の可能性を信じられる世界” “あたらしい景色 (共生社会)の実現” ──その未来を創るのは私たち自身である。ぜひこのような機会を見つけ、選び出し、東京2020 に描く未来を実現していっていただきたい。
[TOP 動画 引用元]
大和ハウスグループ公式チャンネル
【TVCM】One Sky『一ノ瀬メイ×エリー・コール』篇(60秒)
https://youtu.be/WWB2QwG5H-U
CM概要
タイトル:大和ハウス工業株式会社 One Sky『一ノ瀬メイ×エリー・コール』篇(60 秒・30 秒)
放映開始日:2018年4月18日(水)
放映地域:全国
出演:一ノ瀬メイ、エリー・コール
ナレーション:松坂桃李
一ノ瀬メイ
1997年3月17日、京都府生まれ。先天性右前腕欠損症。1歳半から京都市障害者スポーツセンターで泳ぎ始めた。2010 年、中学2年時にパラ水泳女子日本代表としては史上最年少でアジアパラ競技大会に出場し、50 メートル自由形で銀メダルを獲得。2013 年、高校2年時に出場したアジアユースパラ競技大会で 100 メートル自由形と同平泳ぎで日本新記録を樹立し、優勝。100 メートル背泳ぎと合わせて3冠を達成した。2014 年、高校3年時のアジアパラ競技大会(韓国・仁川)で は銀メダル(200 メートル個人メドレー、100 メートル平泳ぎ)と銅メ ダル(50 メートル自由形、100 メートル背泳ぎ)を獲得。 2015 年近畿大学に進学し、水上競技部に入部。同年の世界選手権では 200 メートル個人メドレーで8位入賞。 2016 年3月の選考会では 200 メートル個人メドレーで日本新を樹立し、リオ 2016 パラリンピック出場を決めた。リオ 2016 パラリンピックでは、8種目に出場し、100 メートル自由形では3年ぶりに自己ベストを更新した。

提供:大和ハウス
Ellie Cole (エリー・コール)
オーストラリア メルボルン出身。3 歳のとき、腫瘍により、右足の膝上を切断。その8週間後に、リハビリのため水泳を始める。16 歳で北京 2008 パラリンピックに出場し、3 個のメダルを獲得。ロンドン 2012 パラリンピックでは、金4 個を含む、 6 個のメダルを獲得。その後、肩の怪我に悩まされるが、2015 年世界選手権で 5 枚のメダルを獲得し、完全復活を遂げる。リオ 2016 パラリン ピックでは、金 2 個を含む、6 個のメダルを獲得。

提供:大和ハウス