目次
株式会社RDSが手掛けた新たなプロダクト『bespo』と『MIGRA』『CORE-Ler』の3つが「国際福祉機器展」にてお披露目された。『bespo』は、車いす使用時のあらゆる身体データを計測し、シーティングポジションの最適解を導き出すシミュレーター、『MIGRA』は、それらのデータを元に、実際にフィット具合を確認できる“設定可変型”車いすだ。両者は、ともにデータを共有し、常にユーザーのパファーマンスを最大化できる。『CORE-Ler』は、人の歩き方から認知症などの傾向を読みとるものだ。いずれのプロダクトもさまざまな数値の計測とデータの可視化によって、これまで難しいとされていたことを可能にすることに挑戦した。RDS 代表・杉原行里にこれらプロダクトの解説を仰ぎつつ、『bespo』のデモンストレーションに参加した元パラリンピアン・根木慎志氏にもお話を伺った。
SS01より間口が広く、
対応力が高い、それが『bespo』
RDSが、パラアスリート・伊藤智也氏と二人三脚で車いすのシーティングポジションを研究し、その最適解を導き出すシミュレーター『SS01』を完成させたのは2019年。
それをブラッシュアップさせるべく、国立障害者リハビリテーションセンター研究所(以下:国リハ)や千葉工業大学未来ロボット技術研究センター(fuRo)との共同研究を推し進め、誕生したのが『bespo』だ。
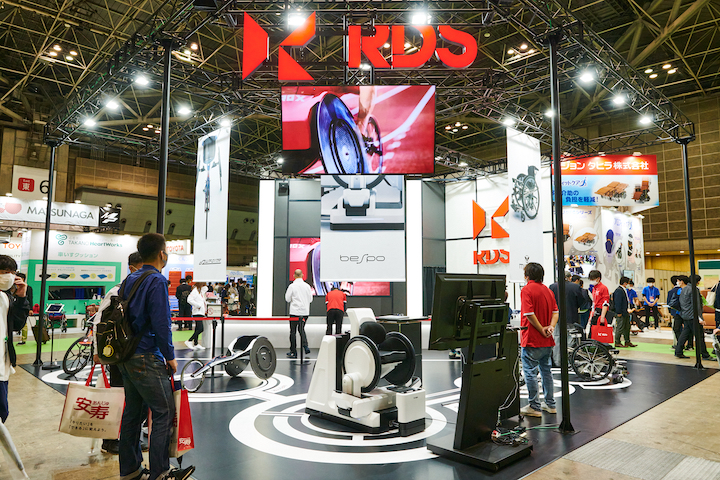
会場でも一際目を引いたRDSのブース
杉原:SS01から大きく進化した点は、胸椎損傷、頚椎損傷の方を問わず対応可能になったこと、そしてトルクや重心位置の計測精度が圧倒的に上がったことです。
加えて、我々が独自に作ったウェルグラフというシステムと連携することで、データの取り込みがさらに効率化され、またデータをより多くの人と共有できるようになりました。
今後は、bespoが機械学習をして、ユーザーのデータを入れると、狙い撃ちで最適なシーティングポジションを割り出してくれる、そんな機能を見据えています。

根木慎志氏が『bespo』にて、シーティングポジションを測定
『SS01』は、ヴィジュアルインパクトに加えて実際のプロダクトも大きかったが、『bespo』はよりコンパクトになった印象がある。とはいえ近未来的なデザインは受け継がれ、洗練されている。
杉原:実際に、SS01の無駄やオーバースペックを取り除いて、よりスマートになりました。ハンドリムは取り外しが可能になって、後ろに3セット分付属しているので、ユーザーの好みやデータに合わせて組み替えも可能です。

一目でわかるバランスや数値に興味津々の根木氏

シーティングの角度、重心、バランス、リムを回した時のトルクなど、全てが瞬時に数値化される
“より一般ユーザー目線を重視した『SS01』”。『bespo』は、まさにそれを体現している。国リハで繰り返された臨床研究や知見を活かし、幅広いニーズに対応するために、細部まで改良されたのだ。
杉原:座面と背もたれを一定の角度を保ったまま倒すチルト角や、フットレストの角度の可動域も広がりました。『SS01』は、レースも意識していたので、どうしてもアスリート目線に偏った部分がありましたが、『bespo』は、一般ユーザーのちょっとした使い勝手まで配慮しています。
とはいえ、レースを目指したアスリートの方のパフォーマンス向上にも役立ちます。単純に用途の枠が広がったイメージですね。

初出展で気分も上がり気味の杉原
最適なシーティングポジションを見つけ出すことは、ユーザーが誰であれ有意義なことだ。間口が広がったことで、今後より一層、病院や施設での導入機会は増えそうだ。
重心やバランスを数値化して理解すれば、
車いすとの付き合い方は変わる
実際に『bespo』のデモンストレーションに参加した根木慎志氏に、体験した感想を伺った。
根木:18歳で車いすユーザーになってから約40年が経ちますが、これまで自分が最適だと思っていたシーティングポジションは、そうではなかったのかもしれません。今日は、それがわかっただけでも大きな収穫でした。自分の体の傾きやバランスが一目でわかるのは、大きなことだと感じました。
シドニーパラリンピック 車いすバスケットボールで日本代表のキャプテンを務めた根木氏。
車いすバスケの元競技者としても、これまで様々な車いすを使用してきた根木氏。『bespo』の登場によって、抽象論で語られた車いすの快適性が、今後数値化されていくことは革新的だと語る。
根木:アスリートの活用はもちろんですが、これだけ細かなデータが可視化できるのであれば、損傷の度合いや、年齢に合わせて具体的な調整ができる。まず、自分の現状を数値で知ることから始めて、それを改善すれば、生活の質は間違いなく上げていけると思います。

無駄を削ぎ落としたスタイリッシュなデザインの『MIGRA』
確かに『bespo』は、多くのユーザーの新たな快適性の基準を作る上で、重要な役割を担うかもしれない。
そして『bespo』で得たデータを、生活の中でリアルに活かすための実践的な車いすとして、同時に発表されたのが、『MIGRA』だ。
“設定可変型車いす”と呼ばれるこのプロダクトは、『bespo』と合わせて活用することで、ユーザーを強力にサポートする。
『bespo』と『MIGRA』がリンクすることで
データの精度は劇的に上がる
杉原:『bespo』よりも簡便的に、でもリッチデータを取ることもできるのが『MIGRA』です。画期的なのは、『bespo』で得たデータを元に、工具レスで設定を変化させてシーティングポジションが最適化することができるとことです。

より汎用性が高い車いすでありながら、『MIGRA』にもセンサーが内蔵されているため、重心の位置や加速度といった必要最小限のデータ採取ができる。
杉原:しかもユニークなのが、『MIGRA』にはアプリケーションが入っていまして、これまでご自身が乗っていた車いすを撮影すると、設定が可視化され、そのデータを元に『MIGRA』に反映することができるのです。

専用アプリをダウンロードしてタブレットで撮影をすれば、シーティングデータが得られる
加えて、『MIGRA』で取ったデータは、『bespo』と同じサーバに溜まっていく。すなわち両者のデータは共有され、違いにアップデートしながら、最適なシーティングポジションを見つけ出していくことができるのだ。
杉原:伊藤選手と『SS01』を作った時に、シミュレーションで出した数値をどこまで信頼していいのか? という疑問は常にありました。実機である『MIGRA』を作ったことで、その疑問は解消されると思っています。

『MIGRA』は、あらゆる調整が工具レスで行える構造
今後、『bespo』で取ったデータを『MIGRA』で実践し、その齟齬や『MIGRA』で得られたデータは『bespo』にフィードバックされる。それにより、シーティングポジションの最適解の精度は劇的に上がることになる。
杉原:『bespo』と『MIGRA』があれば、トライ&エラーに時間とコストがかかるリハビリの現場で、より有意義なデータ採取ができて、リハビリの新しいアイデアも生まれていくと考えています。
さらに、車いすというプロダクトを作る上での職人的な技術や感覚を数値として可視化することもできます。いわゆる“技術継承”にも活用ができれば本望ですね。
さらに会場で人目を惹いていたのが『CORE-Ler』。一見すると何をするものなのかが分からないが、説明を聞いた来場者は一様に感嘆の声を上げていた。

会場には伊藤智也選手(一番左)も駆けつけた
多くの高齢者が悩まされる認知症。歩行解析から認知症リスクを読みとり、対策を行なうことで発症を遅らせることができるとすれば、健康寿命を伸ばすことも不可能ではない。また、車いすの最適なシーティングポジションを追求することは、ユーザーが質の高いライフスタイルを実践することの近道となる。『bespo』と『MIGRA』の登場により、その道筋はまた少し鮮明になった。
これまで、車いすの快適性は抽象的、感覚的なものとして捉えられていたが、それが数値により明確化することが当たり前になる。そんな未来は近いのかもしれない。